

Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
2024-05-06
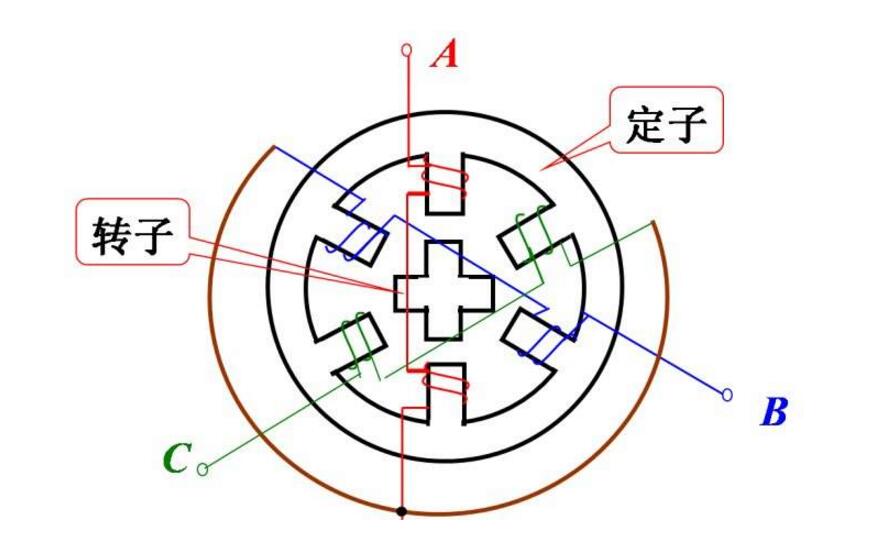
Wanneer een stroom door de statorwikkelingen stroomt, genereert de statorwikkeling een vectormagnetisch veld. Het magnetische veld zal de rotor aandrijven om een hoek te roteren zodat de richting van een paar magnetische velden van de rotor samenvalt met de richting van het magnetische veld van de stator. Wanneer het magnetische veld van de stator een hoek roteert. De rotor draait ook een hoek met het magnetische veld. Elke keer dat een elektrische puls wordt ingevoerd, roteert de motor een hoek naar voren. De hoekverplaatsing die het uitvoert, is evenredig met het aantal invoerpulsen en de snelheid is evenredig met de pulsfrequentie. Door de volgorde te veranderen waarin de wikkelingen worden bekrachtigd, wordt de motor omgekeerd. Daarom kunnen het aantal controlepulsen, de frequentie en de volgorde van energie van de motorfasen worden gebruikt om de rotatie van de steppermotor te regelen.
Veelzijdige soorten motoren hebben ijzeren kernen en wikkelspoelen erin. Wikkelingen hebben weerstand en kracht zal verliezen veroorzaken. Het verlies is evenredig met het kwadraat van de weerstand en de stroom. Dit is het koperverlies dat we vaak zeggen. Als de stroom geen standaard DC- of sinusgolf is, zal deze ook harmonische verliezen opleveren; De kern heeft hysterese. Het wervelstroomeffect produceert ook verliezen in een afwisselend magnetisch veld. De grootte is gerelateerd aan materiaal, stroom, frequentie en spanning. Dit wordt ijzerverlies genoemd.
Zowel koperverlies als ijzerverlies manifesteren zich als warmte, wat de efficiëntie van de motor beïnvloedt. Stappenmotoren zoeken in het algemeen naar positioneringsnauwkeurigheid en koppeloutput, de efficiëntie is relatief laag, de stroom is over het algemeen groot en de harmonische componenten zijn hoog, de frequentie van de huidige afwisselende veranderingen met de snelheid, dus de stappenmotor heeft in het algemeen een verwarmingsconditie, En de situatie is meer algemene ernstige AC -motor.
Drie stappen Motorcircuit Diagramcircuit Circuit één: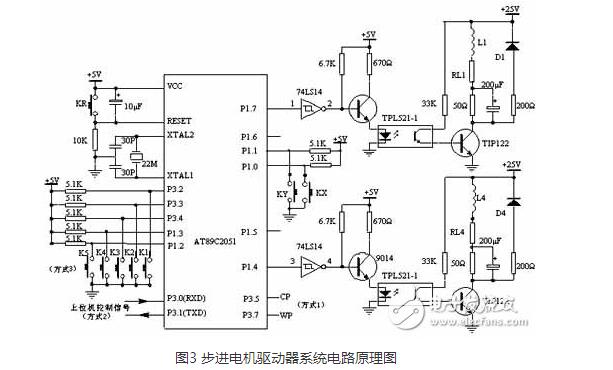
Rl1 ~ rl4 In figuur 3 zijn de interne weerstand van de wikkeling, 50 Ω weerstand is een externe weerstand, fungeert als de limietstroom, het is een component die de tijdconstante van het circuit verbetert. D1 ~ D4 zijn freewheeling -diodes, zodat de achterste EMF gegenereerd door de motorwikkelingen wordt verzwakt door de freewheeling -diodes (D1 ~ D4), waardoor de Power Tube Tip122 tegen schade wordt beschermd.
Het aansluiten van een 200μF -condensator parallel met een 50Ω externe weerstand kan de voorkant van de stroompuls die in de stappenmotorwikkeling wordt geïnjecteerd verbeteren en de hoogfrequente prestaties van de steppermotor verbeteren. De 200Ω weerstand in serie met de freewheeling -diode kan de ontladingstijdconstante van de lus verminderen, de achterrand van de huidige puls in de kronkelende steiler maken, en de huidige valtijd wordt kleiner, wat ook een rol speelt bij het verbeteren van de hoge frequentieoperatie prestatie.
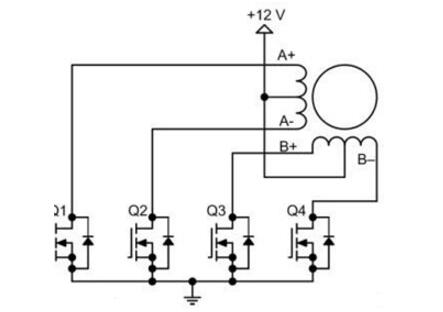
Circuitdiagram 2:Het rijcircuit van de bipolaire steppermotor wordt in de figuur getoond. Het gebruikt acht transistoren om twee fasen aan te sturen. Het bipolaire aandrijfcircuit kan tegelijkertijd vierdraads of zes-wire stepper-motoren aandrijven. Hoewel vierdraads motoren alleen bipolaire aandrijfcircuits kunnen gebruiken, kunnen ze de kosten van massaproductietoepassingen aanzienlijk verlagen. Het aantal transistoren in een bipolair stappenmotor drivercircuit is twee keer dat van een unipolair drivercircuit. Vier van de onderste transistoren worden meestal direct aangedreven door een microcontroller en de bovenste transistor vereist een hoger goedkope bovenste drivercircuit. De transistor van het bipolaire rijcircuit hoeft alleen de motorspanning te weerstaan, dus het heeft het klemcircuit niet nodig zoals het unipolaire rijcircuit.
De stapmotor kan niet rechtstreeks worden aangesloten op de werkfrequentie AC of DC -voeding, maar moet een speciale stappenmotor driver gebruiken, zoals weergegeven in Fig. 2, die is samengesteld uit een pulsgeneratiecontrole -eenheid, een stroomaandrijving en een beschermingseenheid. De twee eenheden omringd door de stippellijn in de figuur kunnen worden geïmplementeerd door microcomputer -besturingselement. De directe koppeling van de aandrijfeenheid aan de steppermotor kan ook worden begrepen als de stroominterface van de steppermotor microcomputer -controller.
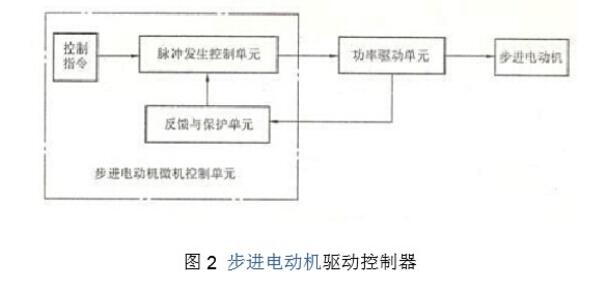
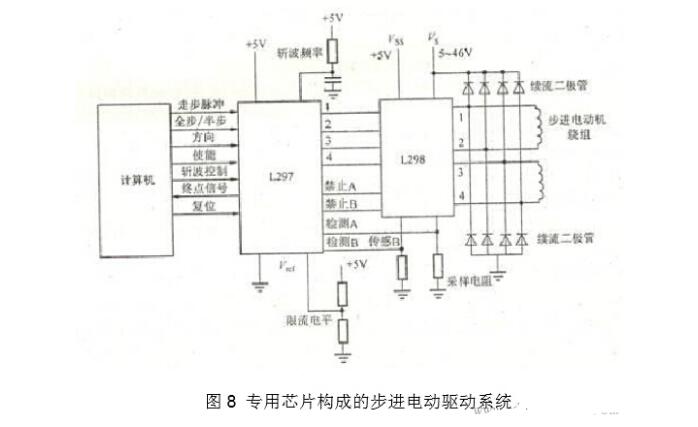
Fig. 8 is een stapmotoraandrijfsysteem met een constante stroomhopperfunctie, die is geconstrueerd met behulp van L297 (cirkelvormige distributeur speciale chip) en L298.
De stappenmotor heeft geen encoder. Als u een encoder aan de stappenmotor wilt toevoegen, kunt u een biaxiale extensie van de steppermotor gebruiken en een encoder aan de achteras toevoegen.
De stappenmotor is de implementatie van het origineel, de encoder is een feedbacksysteem, de encoder wordt gebruikt met een steppermotor en de PLC wordt gebruikt om de werking ervan te regelen. In principe stuurt de PLC een pulsopdracht naar de stepper -stuurprogramma. De bestuurder levert de stappenmotor met de bijbehorende stroom om deze te laten draaien. Wanneer de encoder detecteert dat de stappenmotor de vereiste positie heeft bereikt, zal deze het signaal feedback naar de PLC feedback. PLC -installatie Het feedbacksignaal stopt met het verzenden van het pulssignaal naar het stepper -driver. Wanneer de stappenmotor geen voeding heeft, stopt hij onmiddellijk met werken. (Servomotor is zo'n apparaat). Eigenlijk zal de encoder continu de huidige positie op de PLC feedback. PLC vergelijkt de feedbackwaarde met de doelwaarde om de rotatiehoek van de rotor aan te passen.
Natuurlijk zal het niet stoppen, nadat de stop niet de gewenste positie is, hangt dit af van de vraag of het motorremapparaat? Natuurlijk kan in lage snelheid de voedingsnauwkeurigheid in het algemeen worden voldaan.
Een andere methode is om het aantal pulsen te berekenen dat nodig is om de steppermotor van tevoren te voeden en vervolgens de PLC te gebruiken om zoveel pulsen te programmeren, de steppermotor stopt en de encoder feedback op dit moment om een semi-gesloten te vormen lusbesturing. Naast hogesnelheidspositionering kan het PLC-programma de motor instellen om de feed te vertragen wanneer deze de positie snel bereikt, wat kan voldoen aan de positioneringsnauwkeurigheid.
Stappenmotor plus codering is een beetje belachelijk, het is een verspilling van middelen; Omdat de stappenmotor niet in realtime kan reageren, moet er een versnellings- en vertragingsproces zijn;
Voorbeeld: Oosterse stappenmotor met harmonische reductiemotor, reductieverhouding 100: 1 staphoek: 0,0072 °, wil een encoder toevoegen om te voorkomen dat stappen verliezen, enz. Hier zijn de methoden:
Antwoord: In principe is het ook mogelijk om de motor aan het ene uiteinde van de schroef en het andere uiteinde te monteren om de encoder te installeren. Dit zal echter worden beïnvloed door de nauwkeurigheid van de reducer en een verkeerde inschatting van verloren beweging kan optreden. De encoder is bij voorkeur een motor met dubbele as. De encoder wordt toegevoegd aan de achterkant van de motor. Servo-motoren doen dit tenzij u speciaal gebruik of beperkingen hebt (geen dubbele-out). Het is over het algemeen mogelijk om 2500 lijnen te verwerken. Te hoge lijnen zijn ook een verspilling.
Bovendien is de resolutie van de encoder ongeveer hetzelfde als de resolutie van uw steppermotor. Als de segmentatie op de drive hoog is en u alleen wilt detecteren als u uw stappen hebt verloren, moet de resolutie van de encoder hetzelfde zijn als of iets hoger dan de resolutie vóór segmentatie.
De betekenis van steppermotor plus encoderHoewel de steppermotor nauwkeurig gecontroleerde apparaten kan zijn, maar deze is open-lus, moet een encoder installeren om feedbackbesturing van gesloten lus te bereiken; en kan de stappenmotor uit de stap en rotatie of snelheid meten voor dynamische snelheidsregeling. Voor deze verklaring denkt Xiao Bian dat het eerste punt van open-luscontrole vereist dat de encoder feedback van gesloten-loop nog steeds begrijpelijk is, omdat Xiao Bian zelf in gebruik is, en af en toe vanwege de stepper-motorlijnverbinding is niet goed, wat resulteert in Stap op de motor werkte niet goed. Voor de snelheidsregeling van de tweede stapmotor is deze niet erg nodig omdat de snelheid kan worden gerealiseerd door de pulsfrequentie van de stappenmotor te regelen en het is niet nodig om externe feedback te gebruiken.
Delen op:
Klik Hier om onderzoek te sturen

Ms. carol Dong
Telefoonnummer:86-431-85543703
Fax:86-431---88634119
Mobiel:+8613894866263
E-mail:sales@encoders.com.cn
Adres:333Feiyue Donglu, Changchun City, Jilin Province. China, Changchun, Jilin
Mobiele website
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.