

Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
2024-04-15
Kan businterface van absolute foto -elektrische ascoder
1 INLEIDING De absolute foto -elektrische ashoekcoder is een digitale hoek meetapparaat die de hoekpositie en hoeksnelheid van de roterende as in realtime meet. Het converteert de schachthoekinformatie in digitale codes in de vorm van graden, minuten en seconden, en de busverbinding kan realtime metingen realiseren. Het heeft de voordelen van een hoge werkbetrouwbaarheid, sterk anti-interferentievermogen, hoge precisie, power-off geheugen enzovoort. Het wordt veel gebruikt bij het volgen van digitale metingen en positioneringssystemen zoals schietbereikapparatuur, digitale theodoliet, radar en enkele grote militaire uitrusting.
In deze praktische toepassingscontrolesystemen, vanwege de verschillende gegevensstructuren van de sensoren en detectoren van elk subsysteem, zal de absolute foto -elektrische ascoder verschillende interne gegevenscommunicatiemethoden gebruiken, voornamelijk inclusief RS232, RS485 / 488 seriële poorten, parallelle poorten, enz. . In specifieke technische toepassingen worden de bovenstaande communicatiemethoden echter vaak beperkt door transmissie -afstand en communicatiepercentage. In de afgelopen jaren is seriële communicatie zich snel ontwikkeld en zijn er een verscheidenheid aan busbusvormen voor het besturingssysteem ontstaan. De CAN -bus is een van de meest gebruikte. Het is de afkorting van de Network-netwerkbus van de Local Area-netwerk en is een effectieve ondersteuning voor gedistribueerde controle en realtime controle. Serieel communicatienetwerk. Vanwege de hoge prestaties, een hoge betrouwbaarheid en het unieke ontwerp van CAN-bus, is het de meest populaire en realtime veldbus geworden in binnen- en buitenland. De ontwikkeling en veranderingen van interne communicatiemethoden in het besturingssysteem maken de encoder die wordt gebruikt om hoekverplaatsing en hoeksnelheid te meten, bieden een CAN -businterface om te voldoen aan de veldbusontwerpvereisten van het gehele besturingssysteem.
2 Encoder Working Principle en Data Transmission
2.1 Werkprincipe De encoder bestaat uit twee delen: een data -acquisitieapparaat en een gegevensverwerkingsapparaat. Het structurele blokdiagram wordt getoond in 1. De enkele chip -microcomputer is het kerngedeelte van het encodercircuitsysteem. Na het verzamelen van de encodersignalen (grove code, middelgrote fijne code, fijne code), wordt deze onderverdeeld door fijne code, codekanaalcorrectie, digitale toevoeging, elektrische nulaanpassing, softwareverwerking zoals graad, minuut en tweede conversie, en uiteindelijk weergeven en weergeven en eindelijk weergeven en weergeven Realiseer de interface met het besturingssysteem.
2.2 Data Transmission De gegevensoverdracht tussen de encoder en het besturingssysteem kan worden gebruikt in zowel parallelle als seriële modi. Parallelle transmissie verzendt gegevens via de parallelle poort. Elke gegevens vereist één kern van de gegevenskabel. Een kabel van 24 core is bijvoorbeeld vereist voor een 24-bit encoder. Daarom is de gebruiksruimte beperkt en is deze alleen geschikt voor transmissie op korte afstand en speciale vereisten. gelegenheid. Bij seriële transmissie wordt gegevensinformatie serieel verzonden via een gedraaid paar en worden extra bits toegevoegd volgens verschillende communicatieprotocollen om functies zoals foutcorrectie te implementeren. Deze functie kan worden uitgebreid tot databussystemen. Seriële transmissie heeft minder draden, minder hardware, lage kosten, lange transmissie -afstand en veilige en betrouwbare gegevens.

2.3 Voorgestelde encoder kan businterface in de uitgebreide vergelijking van verschillende veldbussen, het communicatiesysteem op basis van CAN -bus heeft veel uitstekende kenmerken: het gegevenssignaal wordt verzonden door differentiële spanning; Het bustransmissiemedium kan gedraaid paar, coaxkabel en optische vezels gebruiken; kan werken in de multi-master-modus, flexibele communicatiemodus; kan gegevens verzenden en ontvangen in point-to-point, point-to-multipoint en globale uitzendmodus; Knooppuntinformatie op het netwerk kan worden onderverdeeld in verschillende prioriteiten om te voldoen aan verschillende realtime vereisten; niet-destructieve bus arbitragetechnologie; De gegevens hanteren een korte frame -structuur, elk frame is 8byte en het gegevensfoutpercentage is laag; De MAC -sublayer van de datalinklaag in het communicatieprotocol heeft strikte foutdetectiemogelijkheden; Het heeft internationale normen en goede openheid. Daarom wordt in de transformatie van de interne communicatiemodus van het foto -elektrische trackingsysteem de CAN -bus gebruikt als de structuur van de gegevenscommunicatie en vervolgens de codeer -businterface voorgesteld.
3 Toepassing van encoder kan businterface in foto -elektrisch trackingsysteem
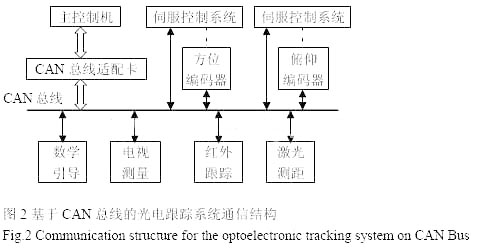
3.1 De encoder wordt gebruikt voor de positiedetectie van het foto -elektrische volgsysteem. De absolute foto -elektrische ascoder is een sensor voor het meten van de azimut en toonhoogtehoek van het foto -elektrische volgsysteem in het foto -elektrische volgsysteem. De interne busstructuur van het foto -elektrische volgsysteem wordt omgezet in de CAN -buscommunicatiemethode. De CAN -businterface heeft de kenmerken van flexibele interface en lijnbesparing. Tegelijkertijd heeft het een microprocessor en kan het worden gebruikt als een intelligent knooppunt in het systeem om externe frames rechtstreeks naar andere apparaten te verzenden om intelligente controle te bereiken. Figuur 2 is een diagram voor communicatiestructuur van het foto -elektrische volgsysteem op basis van CAN -bus. Het foto -elektrische volgsysteem maakt gebruik van een enkele seriële busstructuur van CAN -bus in plaats van de parallelle structuur van meerdere communicatiemethoden. De azimut- en toonhoeken gemeten door de twee foto -elektrische encoders worden via de bus naar de hoofdbesturingsmachine verzonden en de hoofdbesturingsmachine verwerkt de gegevens dienovereenkomstig. Via het busbesturingsservo-besturingssysteem kunnen alle subsystemen met elkaar worden verbonden door een paar twisted paren, die de systeembedrading vereenvoudigt, het algemene systeembusgebruik, realtime gegevensoverdracht en systeemschaalbaarheid verbetert, en de bitfout en de bitfout en de bitfout en de bitfout tarief is sterk verminderen.
3.2 Encoderknooppunt kan de compositie van de hardwarebus van de businterface
De CAN -businterface bestaat voornamelijk uit een enkele chip microcomputer, CAN -buscontroller, CAN -buschauffeur en foto -elektrische isolatiehardware. Het specifieke circuit van de CAN -buscommunicatie -interface wordt weergegeven in figuur 3.
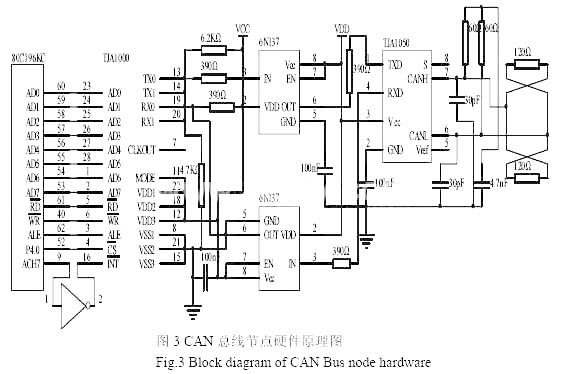
De computer met één chip selecteert Intel80C196KC, een 16-bits ingebedde microcontroller, die meer geschikt is voor complexe realtime controles. Het is ook verantwoordelijk voor de gegevensverwerking van de encoder en de initialisatie van het CAN -busknooppunt. De CAN-controller selecteert de SJA1000 van Philips Semiconductor om de interface voor gegevenscommunicatie tussen de bus en de hostcomputer te realiseren, ondersteunt CAN2.0A en CAN2.0B-protocollen, heeft een uitgebreide ontvangbuffer van 64 byte en ondersteunt first-in eerste eerste eerste -Out (FIFO) -principe, ondersteuning van 11-bit en 29-bit identificatiecodes, communicatiebitsnelheid tot 1 Mbps, kunnen werken in de modus BasicCan en Pelican. De CAN-buschauffeur kiest Philips TJA1050, een high-speed CAN-buschauffeur, die de interface biedt tussen de CAN-controller en de fysieke bus, realiseert de differentiële transmissie- en ontvangstfuncties van de CAN-bus en heeft een brede gemeenschappelijke modusbereik. Onder sterke elektromagnetische interferentie Differentiaalontvangstcapaciteit is het invoerniveau compatibel met 3,3V -apparaten en zullen niet -aangedreven knooppunten de bus niet verstoren. Deelnemen aan TJA1050 kan zorgen voor een snelle gegevenscommunicatie. Voor veiligheid en verbeterde anti-jammingcapaciteit gebruik het gebruik van TJA1050 goede symmetrische prestatiekenmerken, gebruik afzonderlijke terminals. Twee kleine condensatoren van 30PF zijn parallel aangesloten tussen canh en canl en grond, die hoogfrequente interferentie op de bus kunnen filteren en een bepaald vermogen om elektromagnetische straling te voorkomen. Om het anti-interferentievermogen van het systeem verder te verbeteren, wordt een high-speed OptoCoupler 6N137 gebruikt tussen de CAN-controller SJA1000 en de CAN-stuurprogramma TJA1050 om een isolatiecircuit te vormen om galvanisch isolatie te bereiken. De voeding VCC en VDD aan beide zijden van de 6N137 zijn volledig geïsoleerd, wat het circuit tegelijkertijd kan voorkomen, twee 120Ω busimpedantie matching weerstanden moeten aan beide uiteinden van de bus worden aangesloten.
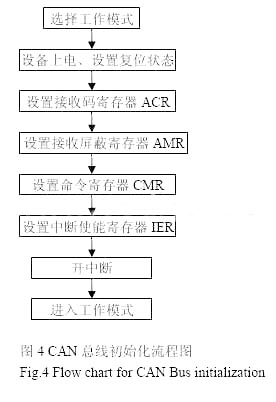
3.3 Knooppuntsoftwareontwerp De hoekinformatie (graden, minuten en seconden) van de absolute foto -elektrische ascoder wordt verzonden vanaf de CAN -controller naar de CAN -bus of naar de CAN -bus naar de CAN -buffer automatisch door de SJA1000 -buscontroller. Het communicatieprogramma van de CAN Bus Interface is samengesteld uit initialisatiesubprogramma, het verzenden van subprogramma en het ontvangen van subprogramma. Selecteer eerst de CAN -buswerkmodus volgens de werkelijke systeembehoeften. Selecteer hier de pelican -modus, 12 MHz kristaloscillator, de busgegevensoverdrachtssnelheid is ingesteld op 500 kbits / s, elk busknooppunt moet dezelfde gegevensoverdrachtssnelheid instellen om normale communicatie te garanderen. Bepaal dat de fysieke verbinding tussen SJA1000 en de MCU betrouwbaar is en vervolgens de SJA1000 -controller initialiseren. Stel in de SJA1000 RESET -modus de initiële status van elk register in. De initialisatiestroomdiagram wordt getoond in figuur 4. De transmissie en ontvangst van gegevens wordt bereikt door de verzendende subroutine en de ontvangende subroutine. De bericht -ID bepaalt de stroom van knooppuntgegevens. Bij het verzenden van gegevens is het instellingsprincipe van het BESSION -ID -ontvangstvlagsegment: de overeenkomstige ID van het knooppunt dat moet worden ontvangen, is de bit 0 en de resterende bits zijn 1. Bij het ontvangen van gegevens is dit het tegenovergestelde. Het wordt door ID beoordeeld of het informatie naar zichzelf is verzonden. Het wordt ontvangen, niet gefilterd.
4. Conclusie
Als communicatiebus op veldniveau heeft Can Bus een hoge betrouwbaarheid en kostenprestaties. De absolute foto -elektrische ascoder met CAN -businterface maakt het flexibeler voor gebruik in besturingssystemen.
Dit artikel is innovatief: de CAN -businterface van de encoder en de toepassing ervan in het foto -elektrische trackingsysteem
Delen op:
Klik Hier om onderzoek te sturen

Ms. carol Dong
Telefoonnummer:86-431-85543703
Fax:86-431---88634119
Mobiel:+8613894866263
E-mail:sales@encoders.com.cn
Adres:333Feiyue Donglu, Changchun City, Jilin Province. China, Changchun, Jilin
Mobiele website
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.