

Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
2024-04-09
Een encoder is een apparaat dat een signaal (zoals een bitstroom) of gegevens samenstelt en converteert in een vorm die kan worden gebruikt voor communicatie, verzending en opslag. De encoder zet een hoekverplaatsing of een lineaire verplaatsing om in een elektrisch signaal, waarbij de eerste een codewiel wordt genoemd en de laatste een code -liniaal wordt genoemd. Volgens de uitleesmodus kan de encoder worden onderverdeeld in contacttype en niet-contacttype; Volgens het werkprincipe kan de encoder in twee typen worden onderverdeeld: incrementele type en absoluut type. De incrementele encoder zet de verplaatsing om in een periodiek elektrisch signaal, dat vervolgens wordt omgezet in een telpuls, en het aantal pulsen wordt gebruikt om de grootte van de verplaatsing weer te geven. Elke positie van de absolute encoder komt overeen met een bepaalde digitale code, dus de indicatie ervan is alleen gerelateerd aan de start- en eindposities van de meting, ongeacht het tussenliggende proces van de meting.

Volgens het detectieprincipe kan de encoder worden verdeeld in optisch, magnetisch, inductief en capacitief. Volgens de kalibratiemethode en de signaaluitgangsvorm kan deze worden onderverdeeld in drie typen: incrementele, absolute en hybride.
1.1 Incrementele encoder De incrementele encoder voert direct drie sets van vierkant golfpuls A, B en Z -fasen uit door foto -elektrisch conversieprincipe; Het faseverschil tussen A- en B -pulsen is 90 graden, zodat de rotatierichting gemakkelijk kan worden bepaald. De Z -fase is één polsslag per revolutie en wordt gebruikt voor het positioneren van referentiepunt. Het voordeel is dat de hoofdstructuur eenvoudig is, de gemiddelde mechanische levensduur kan meer zijn dan tienduizenden uren, het anti-interferentievermogen is sterk, de betrouwbaarheid is hoog en is geschikt voor overdracht op lange afstand. Het nadeel is dat de absolute positie -informatie van de asrotatie niet kan worden uitgevoerd.
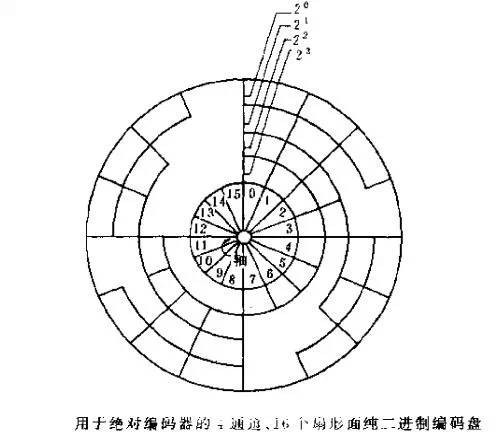
1.2 Absolute Encoder Absolute Encoder is een Direct Output Digital Sensor. Er zijn verschillende concentrische schijven in de radiale richting op zijn cirkelvormige schijf. Elke baan heeft een transparante en ondoorzichtige sector. De sectorboom van het aangrenzende codekanaal wordt verdubbeld. Het aantal codekanalen op het codewiel is het aantal bits van zijn binaire cijfer. Aan de ene kant van de schijf staat de lichtbron en aan de andere kant is er een lichtgevoelig element dat overeenkomt met elk codekanaal. Wanneer de schijf zich in verschillende posities bevindt, converteert elk lichtgevoelig element een overeenkomstig niveau signaal volgens of deze is verlicht of niet, en vormt een binair getal. Het kenmerk van dit type encoder is dat het geen teller vereist en een vaste digitale code die overeenkomt met de positie kan worden gelezen op elke positie van de roterende as. Natuurlijk, moet je N zeggen N? Momenteel zijn er 16 absolute encoderproducten in China.
1.3 Hybride absolute encoder hybride absolute encoder, die twee sets informatie uitvoert, wordt één set informatie gebruikt om de magnetische poolpositie te detecteren, met absolute informatiefunctie; De andere set is volledig hetzelfde als de uitvoerinformatie van de incrementele encoder.
Ten tweede, de toepassing van foto -elektrische encoderHet verschil tussen incrementele encoder en absolute encoder
1, hoekmeting
De autorijdensimulator gebruikt een foto -elektrische encoder als sensor voor het meten van de stuurhoek van het stuur. Het meetinstrument van de zwaartekracht hanteert een foto -elektrische encoder en verbindt zijn roterende as met de compensatieknopas van het meetinstrument van de zwaartekracht. De torsiehoekmeter gebruikt de encoder om de verandering van de torsiehoek te meten, zoals de torsietestmachine en de visserse visserstest. De slinger -impacttestmachine gebruikt de encoder om de impact te berekenen als een verandering in de schommelhoek.
2, lengtemeting
De meter gebruikt de omtrek van de rol om de lengte en afstand van het object te meten.
De draadverplaatsingssensor meet de lengteafstand van het object met behulp van de omtrek van het wikkelwiel.
De directe koppelingsafmeting wordt gecombineerd met de spil van de vermogenseenheid die de lineaire verplaatsing aandrijft en wordt gemeten door het aantal uitgangspulsen.
Media -detectie, in het rechte rek, het kettingtandwiel van de roterende ketting, de timingpoelie, enz. Om lineaire verplaatsingsinformatie over te dragen.
3, snelheidsmeting
Lijnsnelheid, het meten van de lijnsnelheid van de productielijn door verbinding te maken met de meter
Hoeksnelheid, het meten van de snelheid van een motor, as, enz. Door een encoder
4, Positiemeting
Aan de machinezijde, de coördinaatpositie van elk coördinaatpunt van het machinegereedschap, zoals een boorpers, enz.
In termen van automatiseringscontrole voert de controle de opgegeven actie uit op de pastorale positie. Zoals liften, takels, enz.
5, synchrone controle
Door de hoeksnelheid of lineaire snelheid wordt de transmissielink synchroon geregeld om spanningsregeling te bereiken.
Ten derde, incrementele encoder (roterend type)
1, Working Principle:
Een optische codeschijf met een as in het midden, met een ringvormige pass en een donker gegraveerde lijn, gelezen door een foto -elektrisch verzenden en ontvangen apparaat, en vier sets sinusgolfsignalen worden gecombineerd in A, B, C, D, elke sinus, elke sinus, elke sinus Golf een faseverschil van 90 graden (360 graden ten opzichte van een cyclus), keer de C- en D -signalen om, gesuperponeerd op de A- en B -fasen om het stabiele signaal te verbeteren; en voer een Z-fasepuls per revolutie uit om het nul referentiebit weer te geven.
Aangezien de twee fasen A en B 90 graden uit fase zijn, kan de encoder worden verkregen door de A -fase voor of de B -fase te vergelijken om de voorwaartse en omgekeerde rotatie van de encoder te bepalen en kan de nulreferentiepuls worden gebruikt om te verkrijgen de nulreferentiepositie van de encoder.
Het materiaal van de encodercodeschijf is glas, metaal en plastic. De glascodeschijf wordt op het glas afgezet met een zeer dunne gegraveerde lijn. De thermische stabiliteit is goed en de precisie is hoog. De metalen codeschijf wordt rechtstreeks doorgegeven en de lijn is niet verbroken. Vanwege de bepaalde dikte van het metaal is de precisie echter beperkt en is de thermische stabiliteit een orde van grootte erger dan die van het glas. De plastic codeschijf is economisch en de kosten zijn laag, maar de nauwkeurigheid, thermische stabiliteit en het leven zijn beide slecht. .
Resolutie-het aantal passen of donkere lijnen die de encoder levert met 360 graden per revolutie wordt resolutie genoemd, ook bekend als resolutie-indexering, of direct genummerde lijnen, meestal 5 tot 10000 lijnen per revolutie.
2, signaaluitgang:
De signaaluitgang heeft een sinusgolf (stroom of spanning), blokgolf (TTL, HTL), open collector (PNP, NPN), push-pull type, TTL is lange-lijn differentiaalaandrijving (symmetrische a, a-; b, b, b -; z, z-), htl wordt ook push-pull, push-pull-uitgang genoemd, het signaalontvangst-apparaatinterface van de encoder moet overeenkomen met de encoder.
Signaalverbinding Het pulssignaal van de encoder is in het algemeen verbonden met de teller, PLC, computer. De modules die zijn aangesloten op de PLC en de computer zijn verdeeld in modules met lage snelheid en hogesnelheidsmodules. De schakelfrequentie is laag en hoog.
Zoals eenfase-verbinding, voor het tellen van enkele richting, enkele richtingssnelheidsmeting.
AB tweefasenverbinding, gebruikt voor voorwaartse en omgekeerde tellen, oordelen voor en omgekeerd en snelheidsmeting.
A, B, Z driefasige verbinding voor positiemeting met referentiepositiecorrectie.
A, A-, B, B-, Z, Z-Connection, Vanwege de verbinding met een symmetrisch negatief signaal, draagt de stroom bij aan het elektromagnetische veld van de kabel is 0, de verzwakking is minimaal, de anti-interferentie is optimaal , en de lange afstand kan worden overgedragen.
Voor TTL -encoders met een symmetrische negatieve signaaluitgang kan het signaal tot 150 meter reizen.
Voor HTL -encoders met een symmetrische negatieve signaaluitgang is de signaaltransmissie -afstand tot 300 meter.
3, het probleem van incrementele encoder:
Incrementele encoders hebben een cumulatieve fouten op nulpunt, anti-interferentie is slecht, de ontvangende apparatuur moet worden uitgeschakeld en het vermogen moet worden gewijzigd in nul of referentiepositie. Deze problemen kunnen worden opgelost door de absolute encoder te gebruiken.
Algemene toepassing van incrementele encoders:
Snelheidsmeting, het meten van de rotatierichting, het meten van de bewegingshoek, afstand (relatief).
Vier, absolute encoder (roterend type)Er zijn veel optische kanaalgraverenlijnen op de optische schijf van de absolute encoder. Elke regel is gerangschikt in 2 regels, 4 lijnen, 8 lijnen, 16 lijnen ... zodat elke positie van de encoder door elke regel wordt gelezen. De doorgang en het donker van het dradenkruis, verkrijgen een unieke binaire code (grijze code) van de nulvermogen van 2 tot de N-1-kracht van 2, die een n-bit absolute encoder wordt genoemd. Een dergelijke encoder wordt bepaald door de mechanische positie van de optische codeschijf en deze wordt niet beïnvloed door stroomuitval en interferentie.
Absolute encoders zijn uniek in elke positie bepaald door de mechanische positie. Ze hoeven niet te worden herinnerd, hoeven geen referentiepunt te vinden en hoeven niet altijd te tellen, wanneer ze de positie moeten kennen en wanneer ze zijn positie moeten lezen. Op deze manier worden de anti-jamming-eigenschappen van de encoder en de betrouwbaarheid van de gegevens sterk verbeterd.
Van absolute encoders met één draai tot absolute encoders met meerdere turn
Draai de absolute encoder van enkele turn om de scribe-lijnen van de foto-elektrische encoder in rotatie te meten om de unieke code te verkrijgen. Wanneer de rotatie 360 graden overschrijdt, keert de code terug naar de oorsprong, die niet voldoet aan het principe van absolute codering. De code kan alleen worden gebruikt voor metingen binnen een bereik van 360 graden rotatie, een absolute encoder van één draai genoemd.
Als u het rotatiebereik over 360 graden wilt meten, moet u een absolute encoder van multi-turn gebruiken.
De fabrikant van de encoder gebruikt het principe van het horlogevertuigmechanisme. Wanneer het middencodewiel roteert, wordt een andere set codewielen (of sets van versnellingen, meerdere sets codeschijven) aangedreven door de versnelling en wordt het aantal beurten verhoogd op basis van de codering met één draai. Codering Om het meetbereik van de encoder uit te breiden, wordt een dergelijke absolute encoder een multi-turn absolute encoder genoemd, die ook wordt bepaald door mechanische positiebepaling, en elke positiecode is uniek en hoeft niet te worden onthouden.
Een ander voordeel van de multi-turn encoder is dat vanwege het grote meetbereik, het daadwerkelijke gebruik vaak rijker is, zodat het niet nodig is om een nulpunt te vinden tijdens de installatie, en een tussenliggende positie wordt gebruikt als een startpunt, Vereenvoudigt de moeilijkheid van installatie en foutopsporing aanzienlijk.
Delen op:
Klik Hier om onderzoek te sturen

Ms. carol Dong
Telefoonnummer:86-431-85543703
Fax:86-431---88634119
Mobiel:+8613894866263
E-mail:sales@encoders.com.cn
Adres:333Feiyue Donglu, Changchun City, Jilin Province. China, Changchun, Jilin
Mobiele website
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.